Copyright 2022 Google LLC
Licensed under the Apache License, Version 2.0 (the “License”); you may not use this file except in compliance with the License. You may obtain a copy of the License at
https://www.apache.org/licenses/LICENSE-2.0
Unless required by applicable law or agreed to in writing, software distributed under the License is distributed on an “AS IS” BASIS, WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied. See the License for the specific language governing permissions and limitations under the License.
ResNet on CIFAR10 with Flax and JAXopt.
![]()
In this notebook, we’ll go through training a deep residual network with jaxopt.
%%capture
%pip install jaxopt flax tqdm
from datetime import datetime
from functools import partial
from typing import Any, Callable, Sequence, Tuple
from flax import linen as nn
import jax
import jax.numpy as jnp
from tqdm.notebook import trange
import numpy as np
import optax
import tensorflow_datasets as tfds
import tensorflow as tf
from matplotlib import pyplot as plt
from jaxopt import loss
from jaxopt import OptaxSolver
from jaxopt import tree_util
# activate TPUs if available
try:
import jax.tools.colab_tpu
jax.tools.colab_tpu.setup_tpu()
except KeyError:
print("TPU not found, continuing without it.")
tf.config.experimental.set_visible_devices([], 'GPU')
2023-02-16 11:50:30.930308: W tensorflow/compiler/xla/stream_executor/platform/default/dso_loader.cc:64] Could not load dynamic library 'libnvinfer.so.7'; dlerror: libnvinfer.so.7: cannot open shared object file: No such file or directory; LD_LIBRARY_PATH: /usr/local/cuda/lib64:/usr/local/nccl2/lib:/usr/local/cuda/extras/CUPTI/lib64:/usr/local/cuda/lib64:/usr/local/nccl2/lib:/usr/local/cuda/extras/CUPTI/lib64
2023-02-16 11:50:30.930416: W tensorflow/compiler/xla/stream_executor/platform/default/dso_loader.cc:64] Could not load dynamic library 'libnvinfer_plugin.so.7'; dlerror: libnvinfer_plugin.so.7: cannot open shared object file: No such file or directory; LD_LIBRARY_PATH: /usr/local/cuda/lib64:/usr/local/nccl2/lib:/usr/local/cuda/extras/CUPTI/lib64:/usr/local/cuda/lib64:/usr/local/nccl2/lib:/usr/local/cuda/extras/CUPTI/lib64
2023-02-16 11:50:30.930428: W tensorflow/compiler/tf2tensorrt/utils/py_utils.cc:38] TF-TRT Warning: Cannot dlopen some TensorRT libraries. If you would like to use Nvidia GPU with TensorRT, please make sure the missing libraries mentioned above are installed properly.
TPU not found, continuing without it.
#@markdown Total number of epochs to train for:
MAX_EPOCH = 200 #@param{type:"integer"}
#@markdown Number of samples in each batch:
BATCH_SIZE = 128 #@param{type:"integer"}
#@markdown The initial learning rate for the optimizer:
INIT_LR = 0.05 #@param{type:"number"}
#@markdown The model architecture for the neural network. Could be either `'resnet1'`, `'resnet18'`, `'resnet34'`, `'resnet50'` or `'resnet101'`:
MODEL = "resnet34" #@param{type:"string"}
#@markdown The dataset to use. Could be either `'cifar10'` or `'cifar100'`:
DATASET = "cifar10" #@param{type:"string"}
#@markdown The amount of L2 regularization (aka weight decay) to use:
L2_REG = 5e-4 #@param{type:"number"}
CIFAR10 and CIFAR100 are composed of 32x32 images with 3 channels (RGB). We’ll now load the dataset using tensorflow_datasets and display a few of the first samples.
(raw_train_ds, raw_test_ds), info = tfds.load(DATASET, split=['train','test'], as_supervised=True, with_info=True)
input_shape = (1,) + info.features["image"].shape
num_classes = info.features["label"].num_classes
iter_per_epoch_train = info.splits['train'].num_examples // BATCH_SIZE
iter_per_epoch_test = info.splits['test'].num_examples // BATCH_SIZE
raw_train_ds_iter = iter(raw_train_ds)
_, axes = plt.subplots(nrows=4, ncols=5, figsize=(6, 4))
for i in range(4):
for j in range(5):
k = i * 4 + j
image, label = next(raw_train_ds_iter)
axes[i, j].imshow(image, cmap=plt.cm.gray_r, interpolation="nearest")
axes[i, j].set_axis_off()
axes[i, j].set_title(info.features['label'].names[label], fontsize=10, y=0.9)
The accuracy of the model can be improved significantly through data augmentation. That is, instead of training on the above images, we’ll generate random modifications of the images and train on those. This is done by using the transform argument of tfds.load to apply a random crop, random horizontal flip, and random color jittering.
In the next cell we show an instance of these transformations on the above images.
def augment(image, label):
image = tf.image.resize_with_crop_or_pad(image, 40, 40)
image = tf.image.random_crop(image, [32, 32, 3])
image = tf.image.random_flip_left_right(image)
image = tf.image.random_brightness(image, max_delta=0.2)
image = tf.image.random_contrast(image, 0.8, 1.2)
image = tf.image.random_saturation(image, 0.8, 1.2)
return image, label
raw_train_ds_iter = iter(raw_train_ds)
_, axes = plt.subplots(nrows=4, ncols=5, figsize=(6, 4))
for i in range(4):
for j in range(5):
k = i * 4 + j
image, label = next(raw_train_ds_iter)
augmented_image, _ = augment(image, label)
axes[i, j].imshow(tf.cast(augmented_image, tf.uint8), cmap=plt.cm.gray_r, interpolation="nearest")
axes[i, j].set_axis_off()
axes[i, j].set_title(info.features['label'].names[label], fontsize=10, y=0.9)
2023-02-16 11:50:33.041151: W tensorflow/core/kernels/data/cache_dataset_ops.cc:856] The calling iterator did not fully read the dataset being cached. In order to avoid unexpected truncation of the dataset, the partially cached contents of the dataset will be discarded. This can happen if you have an input pipeline similar to `dataset.cache().take(k).repeat()`. You should use `dataset.take(k).cache().repeat()` instead.

Finally, on the test set, we won’t be applying data augmentation to keep a reliable evaluation of the model’s performance. In the test set we’ll only normalize the pixels to be in the range [0, 1].
def normalize(image, label):
image = tf.cast(image, tf.float32)
image = (image / 255.0)
return image, label
train_ds = raw_train_ds.map(augment).map(normalize)
test_ds = raw_test_ds.map(normalize)
train_ds = train_ds.shuffle(5000, reshuffle_each_iteration=True).batch(
BATCH_SIZE, drop_remainder=True).prefetch(tf.data.AUTOTUNE).repeat(2 * MAX_EPOCH).as_numpy_iterator()
test_ds = test_ds.shuffle(5000).batch(
BATCH_SIZE, drop_remainder=True).prefetch(tf.data.AUTOTUNE).repeat(MAX_EPOCH).as_numpy_iterator()
NUM_CLASSES = info.features["label"].num_classes
IMG_SIZE = info.features["image"].shape
With the data ready, we can now define the model. Below we define the ResNet architecture that we’ll later instantiate. We define different variants of the architecture with different sizes and depths ('ResNet1', 'ResNet18', 'ResNet34', 'ResNet50' and 'ResNet101'). The architecture is based on the Flax imagenet example.
class ResNetBlock(nn.Module):
"""ResNet block."""
filters: int
conv: Any
norm: Any
act: Callable
strides: Tuple[int, int] = (1, 1)
@nn.compact
def __call__(self, x,):
residual = x
y = self.conv(self.filters, (3, 3), self.strides)(x)
y = self.norm()(y)
y = self.act(y)
y = self.conv(self.filters, (3, 3))(y)
y = self.norm(scale_init=nn.initializers.zeros)(y)
if residual.shape != y.shape:
residual = self.conv(self.filters, (1, 1),
self.strides, name='conv_proj')(residual)
residual = self.norm(name='norm_proj')(residual)
return self.act(residual + y)
class BottleneckResNetBlock(nn.Module):
"""Bottleneck ResNet block."""
filters: int
conv: Any
norm: Any
act: Callable
strides: Tuple[int, int] = (1, 1)
@nn.compact
def __call__(self, x):
residual = x
y = self.conv(self.filters, (1, 1))(x)
y = self.norm()(y)
y = self.act(y)
y = self.conv(self.filters, (3, 3), self.strides)(y)
y = self.norm()(y)
y = self.act(y)
y = self.conv(self.filters * 4, (1, 1))(y)
y = self.norm(scale_init=nn.initializers.zeros)(y)
if residual.shape != y.shape:
residual = self.conv(self.filters * 4, (1, 1),
self.strides, name='conv_proj')(residual)
residual = self.norm(name='norm_proj')(residual)
return self.act(residual + y)
class ResNet(nn.Module):
"""ResNetV1."""
stage_sizes: Sequence[int]
block_cls: Any
num_classes: int
num_filters: int = 64
dtype: Any = jnp.float32
act: Callable = nn.relu
@nn.compact
def __call__(self, x, train: bool = True):
conv = partial(nn.Conv, use_bias=False, dtype=self.dtype)
norm = partial(nn.BatchNorm,
# use_running_average=True,
use_running_average=not train,
momentum=0.99,
epsilon=0.001,
dtype=self.dtype)
x = conv(self.num_filters, (7, 7), (2, 2),
padding=[(3, 3), (3, 3)],
name='conv_init')(x)
x = norm(name='bn_init')(x)
x = nn.relu(x)
x = nn.max_pool(x, (3, 3), strides=(2, 2), padding='SAME')
for i, block_size in enumerate(self.stage_sizes):
for j in range(block_size):
strides = (2, 2) if i > 0 and j == 0 else (1, 1)
x = self.block_cls(self.num_filters * 2 ** i,
strides=strides,
conv=conv,
norm=norm,
act=self.act)(x)
x = jnp.mean(x, axis=(1, 2))
x = nn.Dense(self.num_classes, dtype=self.dtype)(x)
x = jnp.asarray(x, self.dtype)
return x
ResNet1 = partial(ResNet, stage_sizes=[1], block_cls=ResNetBlock)
ResNet18 = partial(ResNet, stage_sizes=[2, 2, 2, 2], block_cls=ResNetBlock)
ResNet34 = partial(ResNet, stage_sizes=[3, 4, 6, 3], block_cls=ResNetBlock)
ResNet50 = partial(ResNet, stage_sizes=[3, 4, 6, 3],
block_cls=BottleneckResNetBlock)
ResNet101 = partial(ResNet, stage_sizes=[3, 4, 23, 3],
block_cls=BottleneckResNetBlock)
We’ll now load our train and test dataset and plot a few of the training images.
# Set up model.
if MODEL == "resnet1":
net = ResNet1(num_classes=num_classes)
elif MODEL == "resnet18":
net = ResNet18(num_classes=num_classes)
elif MODEL == "resnet34":
net = ResNet34(num_classes=num_classes)
elif MODEL == "resnet50":
net = ResNet50(num_classes=num_classes)
else:
raise ValueError(f"Unknown model {MODEL}.")
def predict(params, inputs, batch_stats, train=False):
x = inputs.astype(jnp.float32) / 255.
all_params = {"params": params, "batch_stats": batch_stats}
if train:
# Returns logits and net_state (which contains the key "batch_stats").
return net.apply(all_params, x, train=train, mutable=["batch_stats"])
else:
# Returns logits only.
return net.apply(all_params, x, train=train, mutable=False), {"batch_stats": None}
logistic_loss = jax.vmap(loss.multiclass_logistic_loss)
def loss_from_logits(params, logits, labels):
mean_loss = jnp.mean(logistic_loss(labels, logits))
sqnorm = tree_util.tree_l2_norm(params, squared=True)
return mean_loss + 0.5 * L2_REG * sqnorm
def _loss_accuracy(params, data, batch_stats, train=True):
"""Return loss and accuracy."""
inputs, labels = data
logits, net_state = predict(params, inputs, batch_stats, train=train)
accuracy = jnp.mean(jnp.argmax(logits, axis=-1) == labels)
loss = loss_from_logits(params, logits, labels)
return loss, (accuracy, net_state["batch_stats"])
loss_accuracy = jax.jit(_loss_accuracy, static_argnums=3)
# Initialize solver.
shedule_fn = optax.cosine_onecycle_schedule(
transition_steps=iter_per_epoch_train * MAX_EPOCH,
peak_value=INIT_LR,
)
opt = optax.sgd(shedule_fn, momentum=0.9, nesterov=False)
# opt = optax.adam(shedule_fn)
# We need has_aux=True because loss_fun returns batch_stats.
solver = OptaxSolver(opt=opt, fun=loss_accuracy,
maxiter=MAX_EPOCH * iter_per_epoch_train, has_aux=True)
# Initialize parameters.
rng = jax.random.PRNGKey(0)
init_vars = net.init({"params": rng}, jax.random.normal(rng, input_shape, dtype=net.dtype))
params = init_vars["params"]
batch_stats = init_vars["batch_stats"]
start = datetime.now().replace(microsecond=0)
# Run training loop.
state = solver.init_state(params, next(train_ds), batch_stats)
jitted_update = jax.jit(solver.update)
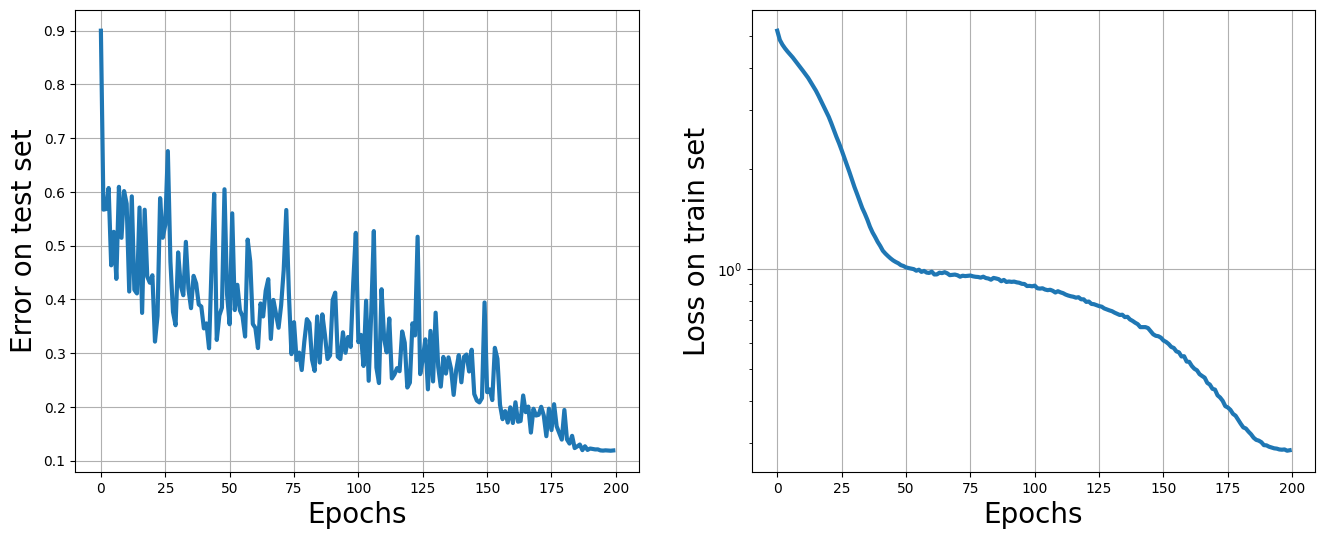
Finally, we do the actual training. The next cell performs 'MAX_EPOCHS' epochs of training. Each epoch is split into 'STEPS_PER_EPOCH' steps. In each step, we sample a batch of 'BATCH_SIZE' images from the training set and perform a gradient step on the loss function.
all_test_error = []
all_train_loss = []
for epoch in trange(MAX_EPOCH):
train_loss = []
for _ in range(iter_per_epoch_train):
params, state = jitted_update(params=params,
state=state,
data=next(train_ds),
batch_stats=batch_stats)
batch_stats = state.aux[1]
train_loss.append(state.value)
all_train_loss.append(np.mean(train_loss))
# make a pass over test set to compute test accuracy
test_acc = []
for _ in range(iter_per_epoch_test):
test_acc.append(loss_accuracy(params, next(test_ds), batch_stats, train=False)[1][0])
all_test_error.append(1 - np.mean(test_acc))
fig, (ax1, ax2) = plt.subplots(1, 2, figsize=(16, 6))
ax1.plot(all_test_error, lw=3)
ax1.set_ylabel('Error on test set', fontsize=20)
ax1.grid()
ax1.set_xlabel('Epochs', fontsize=20)
ax2.plot(all_train_loss, lw=3)
ax2.set_ylabel('Loss on train set', fontsize=20)
ax2.grid()
ax2.set_xlabel('Epochs', fontsize=20)
ax2.set_yscale('log')
plt.show()
# Finally, let's print the test
print('Final accuracy on test set: ', 1 - all_test_error[-1])
Final accuracy on test set: 0.8811097741127014